

Comment apprend-on aux machines à tuer des aliens?

Le challenge ViZDoom
Enseigner à une machine à tuer, et à le faire bien : tel est le fruit issu du travail de chercheurs de Carnegie Mellon University. Derrière cette introduction volontairement provocatrice, les auteurs ont développé un algorithme de machine learning capable de prendre les commandes de Doom, le célèbre jeu vidéo sorti en 1993, dans le cadre du challenge ViZDoom. Ce dernier met à disposition une API permettant de simuler des parties, en fournissant à l’utilisateur des informations visuelles brutes, tout ceci à des fins de recherche sur l’intelligence artificielle et l’analyse d’image. Dans ce jeu de tir à la première personne, le joueur a pour but de se mouvoir dans un décor en 3D, et d’éliminer d’éventuels ennemis.
Vidéo de l’IA aux commandes de Doom, en configuration deathmatch[1].
Alors que la plupart des études similaires ont lieu dans des jeux en 2D, ce travail se distingue notamment par le fait d’utiliser un algorithme d’apprentissage par renforcement dans des environnements en 3D, impliquant une vue partielle de l’état du jeu (limitée par la vision du joueur), et une vue à la première personne. De plus, jouer à Doom nécessite plusieurs compétences clés : naviguer dans un environnement en 3D, récupérer des objets, ainsi que reconnaître des ennemis. Même si la machine a encore besoin de 3 moteurs différents pour naviguer, détecter les ennemis, et tirer, elle peut néanmoins surpasser l’IA native, et mieux jouer que des humains dans des parties multijoueurs.
Apprentissage par renforcement
Mais comment cette Intelligence Artificielle (IA) a-t-elle appris à jouer seule dans cet univers complexe ? Elle s’inspire en grande partie des algorithmes d’apprentissage par renforcement (ci-après RL pour Reinforcement Learning) utilisés entre autres par l’équipe de Google DeepMind. On se rappelle notamment des travaux de cette même équipe de recherche dans l’apprentissage des jeux ATARI surpassant même dans certains cas un joueur humain expert (voir Figure ci-après). La propriété remarquable, commune à toutes ces IA, est de s’appuyer uniquement sur les données brutes du jeu : les pixels, les commandes disponibles, et le score ; tel un humain.
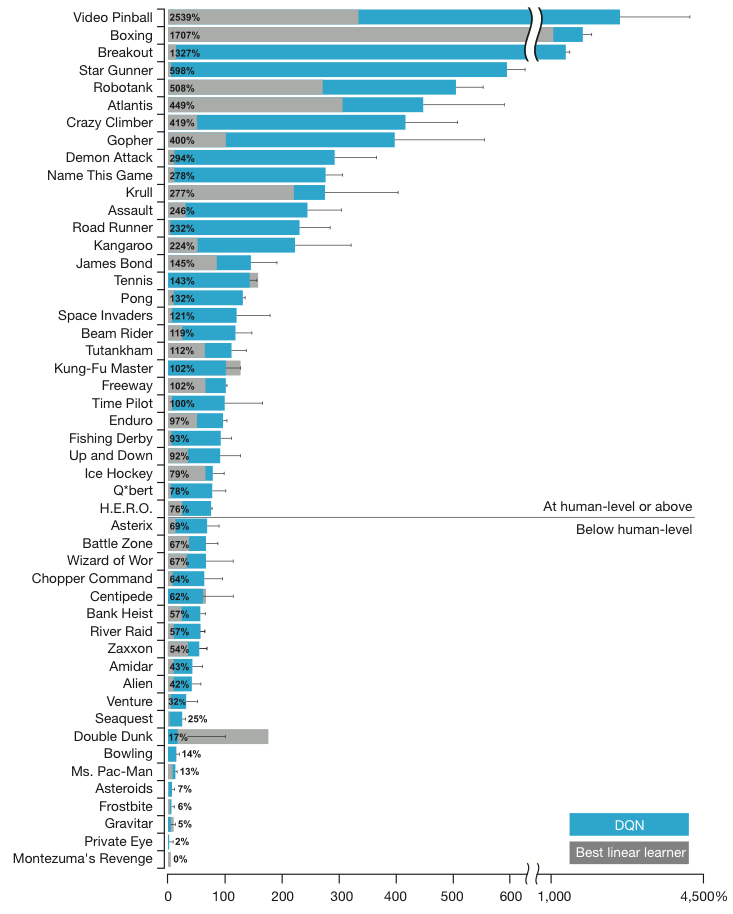
Comparaison entre l’agent développé par l’équipe de Google DeepMind (DQN pour Deep Q-learning Network) et les autres méthodes RL issues de la bibliographie. La performance est normalisé par rapport à un joueur humain professionnel (noté à 100%) et un joueur jouant aléatoirement (note à 0%). Crédit: Mhin et al, Nature (2013)
Cependant, enseigner à une machine à jouer, à partir directement des données visuelles, est un réel défi pour le RL. La plupart des applications de RL s’appuient en effet sur des représentations spécifiques des données du jeu grâce à l’intervention d’une entité humaine. Dans le cas présent, l’innovation réside dans cette capacité, sans aucune intervention humaine, à apprendre à partir d’un signal complexe, bruité, avec des enjeux de court et de long terme. En effet, le délai avant lequel une action peut conduire à une éventuelle récompense atteint parfois des milliers de pas de temps. Par ailleurs, les données reçues ont une corrélation temporelle très forte. Ces difficultés nous placent donc dans une situation aux antipodes des situations traditionnellement rencontrées en machine learning supervisé.
Vidéo de l’IA jouant à l’un des plus célèbres jeux de ATARI des années 1970, casse-brique, dont le but est de détruire des briques à l’aide d’une balle, sans faire tomber cette dernière.
L’algorithme Q-learning
Cette section s’attardera sur la formalisation du RL, et plus particulièrement d’un de ses dérivés, le Q-learning, utilisé dans les travaux suscités. Le principe de cette technique est, pendant la phase d’apprentissage, de déterminer la meilleure action à effectuer, dans chaque situation ; puis, de rarement tenter une action alternative de façon à explorer des opportunités de meilleures récompenses (i.e. un meilleur score). Ainsi, l’algorithme trouve un compromis entre le risque de rater des opportunités de meilleure récompense, et le risque d’obtenir une récompense plus faible voire négative. Cette approche est d’une certaine manière similaire à l’algorithme du bandit manchot.
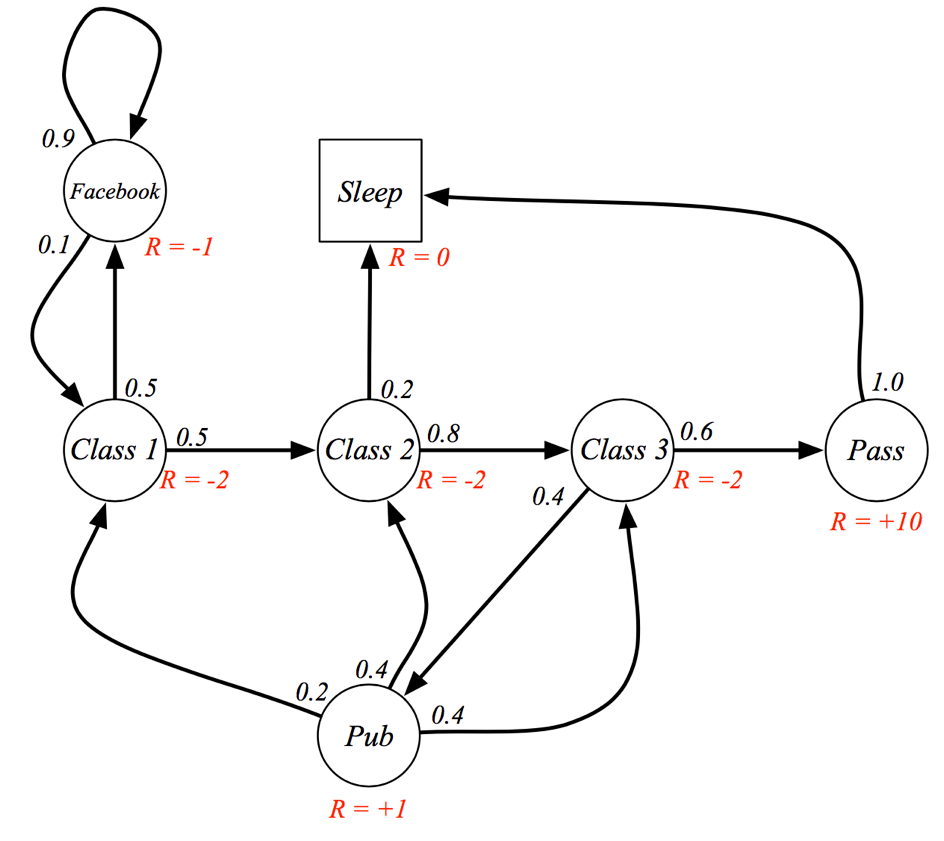
Pour cela, nous modélisons la situation par un Markov Decision Process (MDP). Dans ce contexte, le process (l’image envoyée par le jeu) peut se trouver dans un certain nombre n d’états, chacun caractérisé par une récompense, c’est à dire le score. Le jeu peut passer d’un état à un autre avec une certaine probabilité, souvent représentée par une matrice de probabilité de transition (de taille n*n). Un agent (la machine simulant le joueur) peut influencer ce changement d’état au travers d’actions (les commandes du jeu).
Le problème est donc de trouver pour chaque état, la meilleure action à entreprendre afin de maximiser son score. En d’autres termes, l’algorithme doit trouver la meilleure politique de jeu, un mapping entre une situation et une action, pour maximiser son score. Cependant, une action peut momentanément ne pas apporter une récompense immédiate, mais avoir une récompense ultérieure bien plus importante. Il peut donc exister un délai entre une action et la récompense. Pour prendre en compte cet aspect, il convient donc de sommer les récompenses dans le temps (jusqu’à un horizon temporel fini), suite à une action. L’importance d’une récompense immédiate par rapport à une récompense future est contrôlée par un paramètre d’affaiblissement compris entre 0 et 1. Lorsque ce paramètre vaut 0, alors l’algorithme va privilégier uniquement les récompenses immédiates (on parle de myopie temporelle). Au contraire, si ce paramètre vaut 1, alors il privilégiera les récompenses futures (on parle d’hypermétropie temporelle).
Connaissant la probabilité de transition d’un état à un autre (plus ou moins bien estimée par la taille du jeu d’entraînement), l’ensemble des états possibles, et l’ensemble des actions possibles, nous pouvons en principe calculer la politique optimale du jeu. Cependant, l’espace des états (et parfois des actions) étant astronomiquement large, il est numériquement impossible à ce jour de calculer directement cette solution[2]. Il est par conséquent nécessaire de se rabattre vers une solution numérique approchée, le Q-learning. Ce dernier est un algorithme cherchant à trouver itérativement, par essais et corrections successifs, la meilleure récompense possible, ajustant à la volée sa politique de jeu jusqu’à se stabiliser vers un score optimal. Rappelons qu’au cours de ces itérations, l’algorithme tente aléatoirement des actions alternatives (par rapport à celle jugée la meilleure) pour « explorer » de nouvelles possibilités (algorithme dit ε-greedy).
Enfin, afin de lever la corrélation temporelle entre des états successifs, plutôt qu’un apprentissage online plus traditionnel, il est courant d’utiliser la méthode experience replay (Lin 1993). Au lieu d’exposer l’agent à une image, on lui présente des séquences d’images nommées épisodes, que l’on range ensuite dans l’experience memory. Puis, on tire aléatoirement des séquences de cette dernière pour entraîner l’algorithme. Un second avantage de cette approche est d’éviter l’apprentissage de situation particulière de jeu. Par exemple, si pendant un certain temps l’action « tourner à gauche » est la meilleure action à prendre, alors les paramètres de l’algorithme peuvent rester bloquer dans ce minimum local. Tirer aléatoirement des épisodes permet ainsi de moyenner les expériences passées et éviter ces phénomènes d’oscillation d’action.
L’approche décrite ci-dessus suppose que l’agent a une vision complète de l’état du jeu. Nous n’aborderons pas dans cet article les subtilités apportées par la vision partielle du système. Cette dernière, ajoute certes une couche de complexité supplémentaire, mais ne change pas fondamentalement le principe de l’algorithme.
L’osmose entre machine learning et jeux vidéo
Les jeux vidéo offrent un terrain plus qu’idéal pour les recherches en machine learning. L’environnement est parfaitement contrôlé, et l’on peut à loisir varier chaque paramètre d’exécution, et enregistrer toute donnée nécessaire à l’étude. De nombreuses initiatives ont ainsi vu le jour, à l’image de ViZDoom. Par exemple, ce récent article applique un algorithme de RL au jeu de stratégie temps réel Starcraft dans lequel le joueur doit construire une armée et contrôler individuellement chaque unité dans le but de détruire l’armée adverse. La difficulté de ce jeu, d’un point de vue IA, réside dans la nécessité de prendre le contrôle d’un large nombre d’unité (typiquement quelques centaines) dans un environnement vaste mais seulement partiellement observable (dû au brouillard de guerre). De plus, le joueur doit à la fois gérer les enjeux de courts termes pendant les phases de combat en manipulant individuellement ses unités, tout en gardant en tête sa stratégie de long terme dans un environnement incertain en constante évolution. Ceci implique, de fait, un très large espace des états et d’actions possibles. Dans une partie typique, le nombre d’états possibles peut atteindre facilement 10¹⁶⁸⁵ (en comparaison, le jeu de Go possède “seulement” 10¹⁷⁰ états possibles).
Partie commentée dans le cadre du challenge AIIDE Starcraft AI Competition 2011, entre un humain (unités Terran en orange) et un algorithme RL (unités Protoss en jaune) certes pas encore très expérimenté. Notez le brin d’humour du joueur humain à 0:21 souhaitant bonne chance à son adversaire machine avec le traditionnel « gl hf » (good luck have fun).
Comme témoin de l’engouement autour du couple machine learning/jeux vidéo, la compétition organisée par l’Artificial Intelligence and Interactive Digital Entertainment (AIIDE), pour développer une IA autour de Stacraft, a été renouvelée début 2016. Encore plus récemment, en novembre 2016, Google DeepMind a annoncé sa collaboration avec l’éditeur Blizzard, proposant une plateforme de recherche similaire à ViZDoom, mais cristallisée autour du jeu Starcraft 2. Ceci annonce encore des beaux jours pour cette communauté.
Aperçu des fonctionnalités supplémentaires apportées par une surcouche via une API (à gauche) sur le jeu Starcraft 2 (à droite).
Jeux vidéo et réalité : est-ce si différent ?
Dans cet exemple, l’IA a été entraînée exclusivement à exécuter des cibles assimilables à des humains (quoiqu’un peu burlesques). Mais quelle distinction un algorithme fait-il entre des pixels issus d’un jeu vidéo tel que Doom, et la réalité capturée à travers l’objectif d’une caméra numérique ? Aucune. Ainsi, outre la prouesse technique démontrée, et bien que l’algorithme arbore de nombreuses limitations (faible nombre de pixels, limite du nombre d’actions disponibles, long temps d’apprentissage etc.), ces travaux soulèvent immédiatement une question éthique : doit-on implémenter une forme de morale dans l’IA ?
Le MIT a choisi d’approcher la question par l’humour via un site internet récemment mis en ligne. Le site nous donne les commandes d’un véhicule autonome dans une situation d’accident imminent où nulle autre alternative n’est laissée au décès d’un ou de plusieurs figurants. Chaque figurant peut être identifié par son âge, son sexe ou encore son statut social, autant de paramètre à prendre en compte dans notre décision. Derrière cette approche cocasse et volontairement provoquante se pose la question de la définition d’une morale des IA et de la valeur d’une vie humaine. C’est ce type de questions auxquelles les concepteurs de la conduite automatisée sont déjà confrontés. Bien loin des lois de la robotique définies par Asimov établissant qu’un robot ne doit en aucun cas blesser un être humain, les machines sont aujourd’hui bel et bien confrontées à des choix moraux impliquant des conséquences pouvant être graves.
Rappelons que la morale désigne un ensemble de règles, de principes ou d’actions conforme à une société donnée. Parce que ces normes peuvent varier d’une société à une autre, voire d’un individu à un autre, on peut se demander s’il existe une forme de morale absolue, ou en tout cas quantifiable par une machine, et tirer ainsi parti de sa facette impartiale. De fait, on parle ici d’une morale qualifiée de téléologique[3] (ou conséquentialiste), à l’opposée d’une morale déontologique kantienne. Le problème se réduirait alors à une situation plus classique de machine learning, dans laquelle l’algorithme ne fait qu’effectuer une tâche de manière la plus optimale possible. C’est bien là ce qu’on attendrait d’une machine, même si l’on reste à la merci d’un biais dans le jeu d’entraînement ou dans la composition des variables.
Ces questions suscitent évidemment de vifs débats. Ainsi, pour s’assurer que ces recherches restent transparentes et ouvertes à tous, une association à but non lucratif, OpenAI, a été fondée en décembre 2015 pour contribuer au développement open source d’une intelligence artificielle. Elon Musk (PDG de Tesla, SpaceX, etc.) et Sam Altman (PDG de YCombinator) figurent parmi les fondateurs de cette initiative. L’androïde issu de la littérature de Philip K Dick ou Isaac Asimov n’a jamais été aussi palpable et les bonnes questions doivent être posées afin d’établir la morale qui régira ces intelligences artificielles. L’étau se resserrerait-il autour de la distinction a priori certaine et acquise entre les hommes et les machines ?
[1] Mode de jeu dans lequel le but est simplement d’éliminer le plus de joueurs possibles
[2] Cette opération repose en fait sur l’inversion d’une matrice n*n, avec une complexité algorithmique O(n³)
[3] interprétée à la lumière de ses finalités ou de ses conséquences
